


扫一扫
加微信
车都是以铁轨为轨道,靶车只能按照预设轨道直线移动。若结合实际需要变更移动路线就得重新铺设轨道,不但花费时间长、代价高,给射击也带来跳弹隐患。随着国际形势的一直在变化和反恐训练的要求,打靶训练中要求靶车不但可以依据训练项目随时调整靶机距离,还能够快速变更移动路线,实现直线、曲线等多向运动模式,以满足现代化、多科目的训练要求。
本文研究一种能够对路径进行自主识别的自循迹移动靶控制管理系统,该系统采用普通的胶条或油漆制成的色带作为引导线,通过摄像头传感器动态提取引导线的位置来判别靶车的运行姿态,进而控制靶车的移动方向,实现对路径自主识别的功能。
在实际应用中,靶车带有较厚的防护钢板和防跳弹橡胶,移动和停位时惯性较大难以控制,况且射击训练中对靶车的移动速度和弯道曲率要求不高,所以自循迹移动靶车采用三轮结构的驱动方式。前面两轮作为独立的主驱动轮,后轮为万向轮。前面两轮除负责前进、后退外,当转速不同时可以在一定程度上完成靶车的曲线行走和原地旋转。
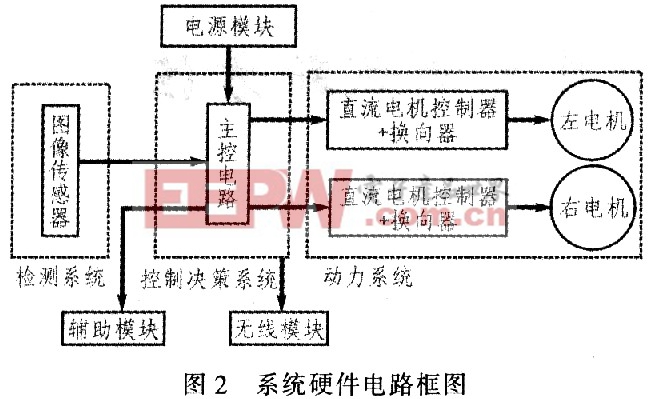
整个控制管理系统可分为检测系统、控制决策系统和动力系统3部分。检测系统相当于靶车的“眼睛”,采集靶车移动的路径信息;控制决策系统相当于靶车的“大脑”,保证系统稳定、协调、有序的工作;动力系统用于完成靶车的各种运动姿态。系统的工作信息流程如图1所示,检测系统实时采集靶车移动的路径信息,经控制决策系统分析、处理后控制动力系统做出相应的调整,实现对靶车位置的精确定位和动作控制。
系统硬件平台主要由图像采集模块、主机控制电路和电机驱动电路组成,如图2所示。
基于ATMegal28内部集成有64 kh Flash存储器和丰富的硬件接口电路,不但可以直接驱动继电器,而且定时器的相频修正PWM模式是基于双斜坡操作可以产生高精度的、相位与频率都准确的PWM波形,适合电机的调速控制,所以采用ATMegal28的最小系统作为系统的主机控制电路。
系统采用OV7620摄像头模块进行路径信息的采集。OV7620图像传感器不仅能直接输出行场同步中断信号,而且具有自动增益和自动白平衡控制,能进行亮度、对比度、饱和度等多种调节功能,不但省去了复杂的视频解码过程。而且使靶车能适应于不同的应用环境。实际上,控制靶车并不是特别需要分辨率很高的图像,相反分辨率低一些的图像不仅有利于减少存储所用的空间,而且加快单片机的图像处理的速度。结合摄像头的视野大小,系统将图像采集分辨率由原始的492x664降低到25x47,保证系统能快速、有效的采集路劲信息。
双极性可逆PWM系统虽然在低速时运行平稳,但电流波动大,功率损耗较大,尤其是必须增加死区来避免开关管直通的危险,限制了开关频率的提高,所以系统采用单极性可逆PWM方式驱动电机,避免了开关管直通、提高系统的可靠性,尽管轻载时会出现断流,能够最终靠提高开关频率的方法或改进电路来克服,具有驱动能力强、控制简单、速度快、可靠性高且成本低等优点。驱动控制器电路如图3所示。

 咨询请点击此处
咨询请点击此处